Neocis | R&D Robotics Engineering Intern
Creative Machines Lab, Columbia University | Research Assistant
Bio Robotics and Design Lab, Singapore University of Technology and Design | Visiting Researcher
Centre for Product Design and Manufacturing, Indian Institute of Science | Research Intern
Miami, Florida (Jun 2020 – Present)
New York, NY (Sep 2019 – May 2019)
Changi, Singapore (Jan 2019 – May 2019)
Bangalore, India (May 2018 – Jun 2018)
Neocis Inc.
Robotics Engineering Intern (June 2020 – present)
- Implementing Image Quality Assessment Metrics such as Uniformity, Noise, Low Contrast Ratio and Noise Power Spectrum for qualification of Cone Beam Computed Topography Scanners, to be used with the Yomi Robot for dental implant surgery
- Designing a handheld device to check the rigidity of Splints used to fix a 7 DOF robot tracker arm to the patient’s jaw for minimizing surgery failure rate
Bio Robotics and Design Lab, SUTD
Visiting Researcher (Jan 2019 – May 2019)
Vacuum Actuated Soft Robotic Gripper
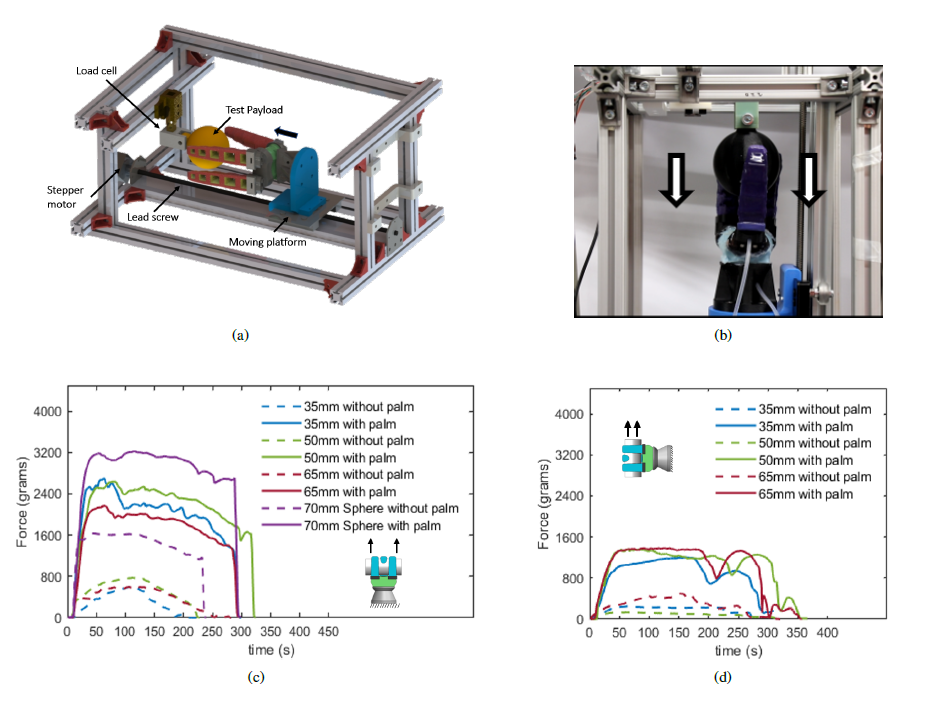
Optimizing both payload capacities and the ability to robustly grasp a wide range of object geometries is challenging with contemporary soft gripper designs. In particular, achieving grasp robustness with soft structures for manipulation tasks at high speeds (speed being one of the advantages sought from automation) is quite difficult. This work presented the design and characterization of a soft vacuum powered gripper that uses an actively controlled palm to increase grasping and payload ranges. This work was done as a part of my Undergraduate Thesis at the Bio Robotics and Design Lab, Singapore University of Technology and Design.
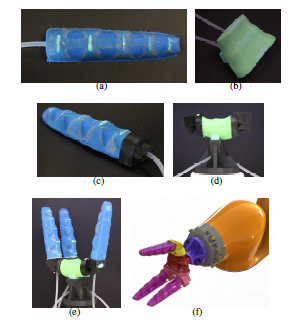
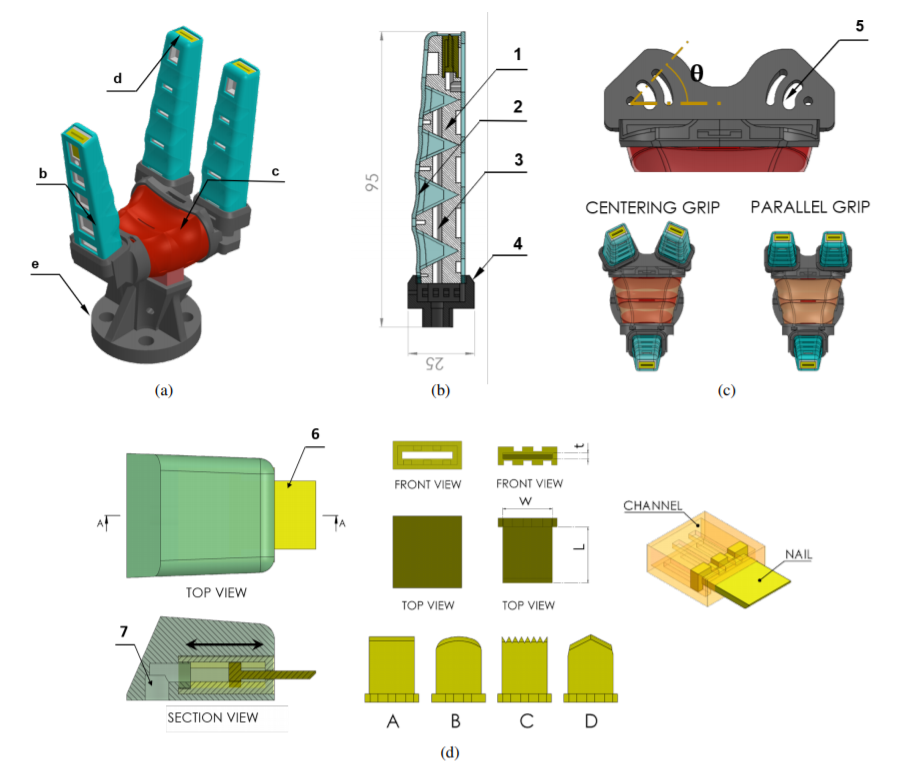
The gripper structure is a hybrid of soft and stiff components to facilitate integration with traditional arm manipulators. Three fingers and a palm constitute the gripper all of which The fingers and palm have anthropomorphic designs and vacuum actuated. Internal wedges are used to tailor the deformation of a soft outer reinforced skin as vacuum collapses the composite structure. Thanks to its active palm, the gripper is capable of grasping a wide range of part geometries and compliances while achieving a maximum payload of 30N. The gripper natural softness enables robust open loop grasping even when components are not properly aligned. Furthermore, the grasp pose of objects with various aspect ratios and compliances can be robustly maintained during manipulation at linear accelerations of up to 15m/s2, and angular accelerations of up to 5.23rad/s2.
The finger nail mechanism is pneumatically actuated and enables the gripper to perform complex grasping and manipulation tasks with high repeatability. The retracted nails can exert normal grasping forces of up to 1.8N and enable grasping of objects up to 200µm thick from flat surfaces, while allowing the gripper to execute delicate pinch grasps.
A re-configurable soft gripper design with retractable nails was successfully characterized. The limitations of traditional soft bending actuators for grasping thin objects from flat surfaces have been highlighted through theory and experimentation. The tangential force of the retractable nails can be made compliant by adjusting the input positive pressure. By demonstrating the capability to grasp very thin (200µm) and flexible items from flat surfaces, this study opens up several applications for soft grippers in industrial automation

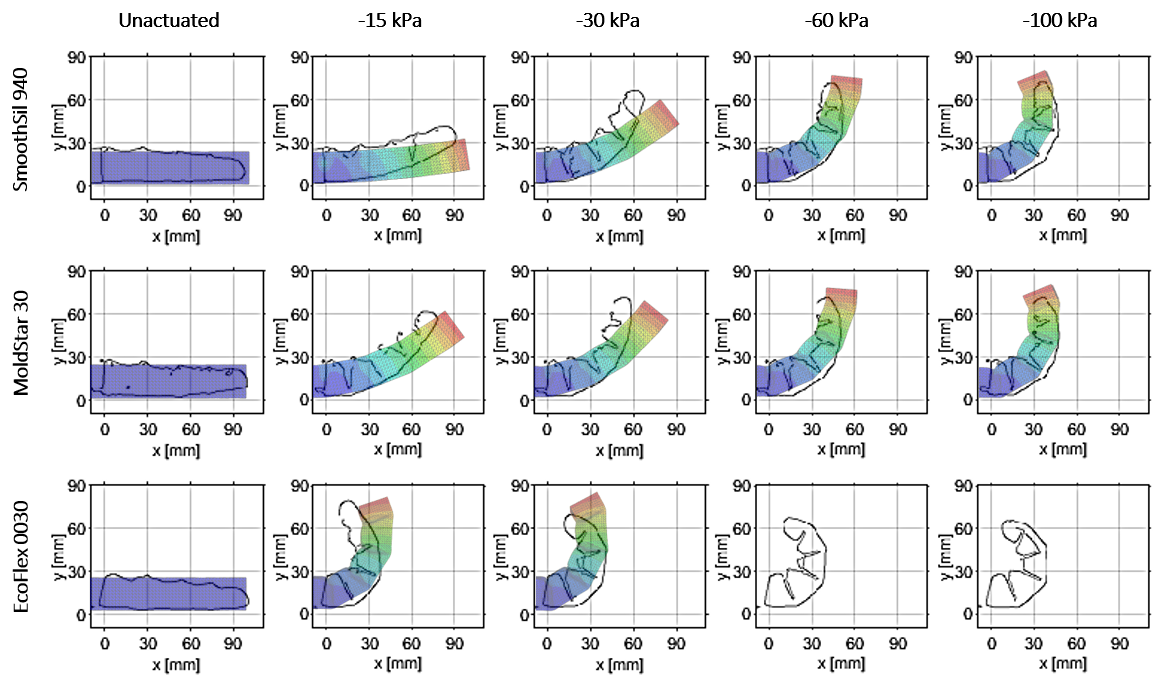
A finite element model using hyper-elastic constitutive relations showed good agreement with finger bending experiments and can be used to guide design iterations by predicting the impact of geometry and material selections. However, more work is needed to enable true design optimization of the multi-material composite structures used in the gripper. The main challenge in this front is the selection of appropriate constitutive models as dynamic applications (e.g. in-hand manipulation) will require the inclusion of visco-elastic effects. The gripper internal structures determine steady state maximum grasp poses and the soft skin material determines power requirements, actuation speed, and actuation stress. The silicone materials currently used are food safe, hypoallergenic, and can tolerate high temperatures providing a solid foundation for a broad range of applications.
Creative Machines Lab, Columbia University
Research Assistant (Sep 2019 – May 2019)
Autonomous Wheeled Robotic Cleaner
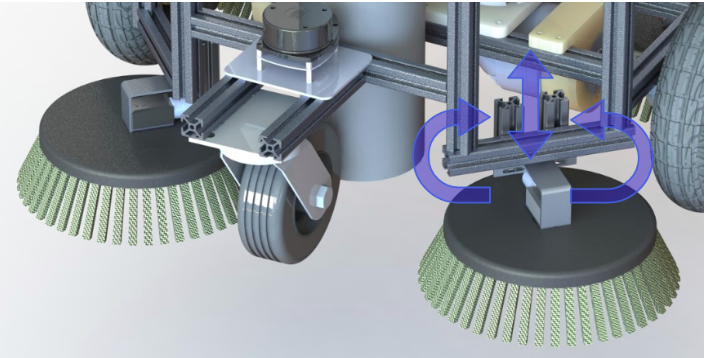
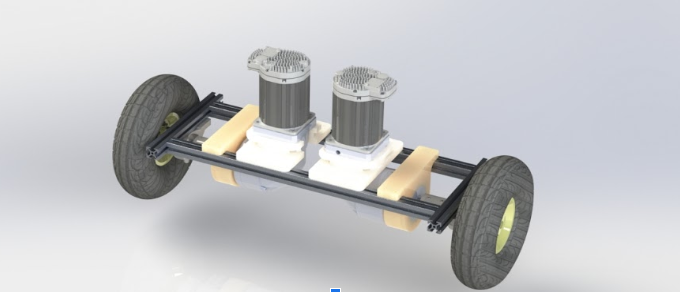

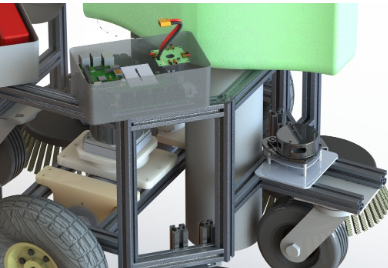
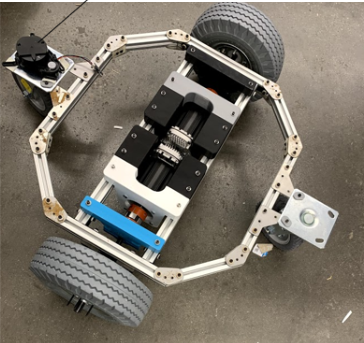

This work presented here is a part of my work done as a Research Assistant in the Creative Machines Lab, Columbia University under Dr. Hod Lipson. An autonomous robotic vacuum cleaner was designed for picking up light debris from the parks and playgrounds of New York City. The robot is a differential drive platform, with 9″ drive wheels powered by 2 Teknic motors with encoders for negotiating different terrains and ramp grades, and 2 caster wheels for support. The platform is octagonal in shape to make path planning simpler and is 2.3 feet wide and 2 feet high. The robot which runs using a RasPi 3B board, uses Robotis LDS-01 Lidar for identifying obstacles and planes using RANSAC algorithm. The robot performs sensor fusion after processing input from the LiDAR, IMU and motor encoders for state estimation and localization, and uses SLAM for executing a collision free trajectory. A vision based algorithm has been implemented using Faster Mask R-CNN approach for identifying and navigating over the scattered debris, and cleaning it up.
